Magnetically Driven Microrobot System
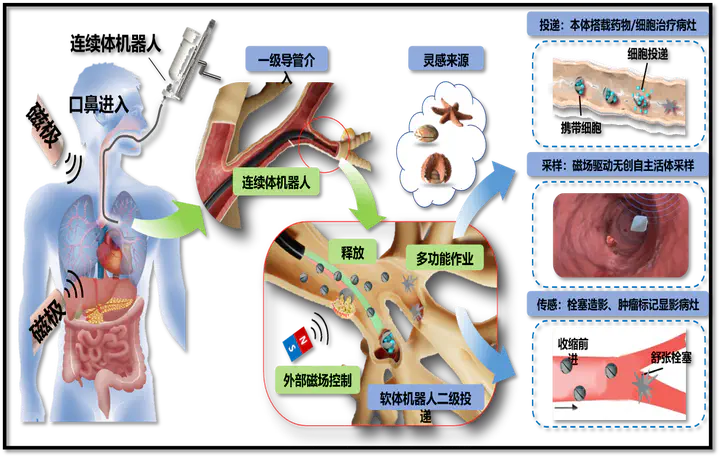
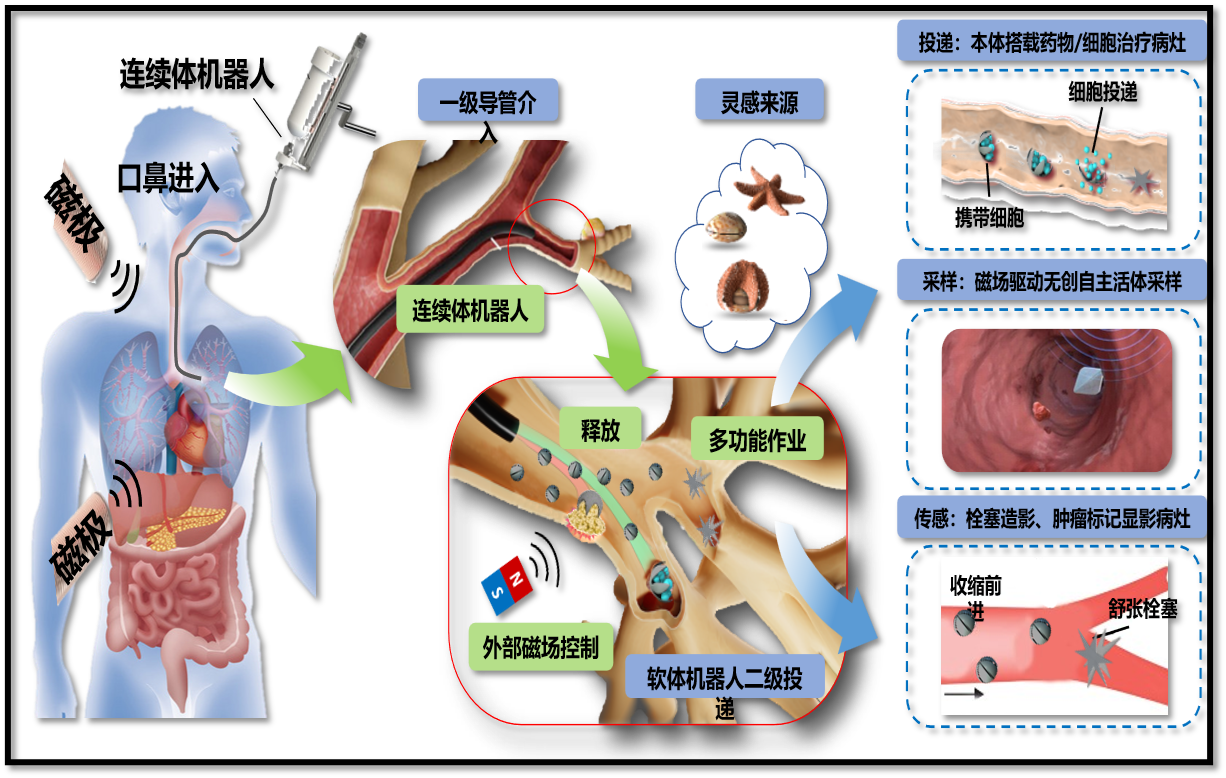
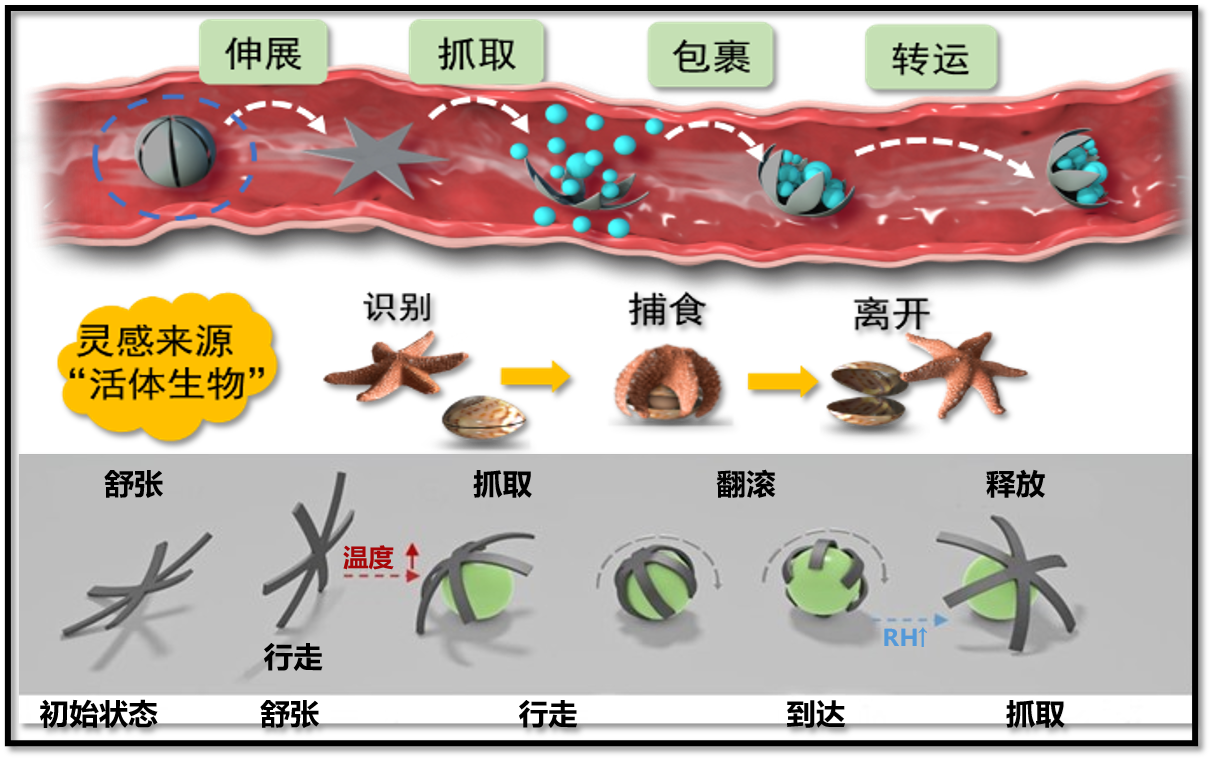
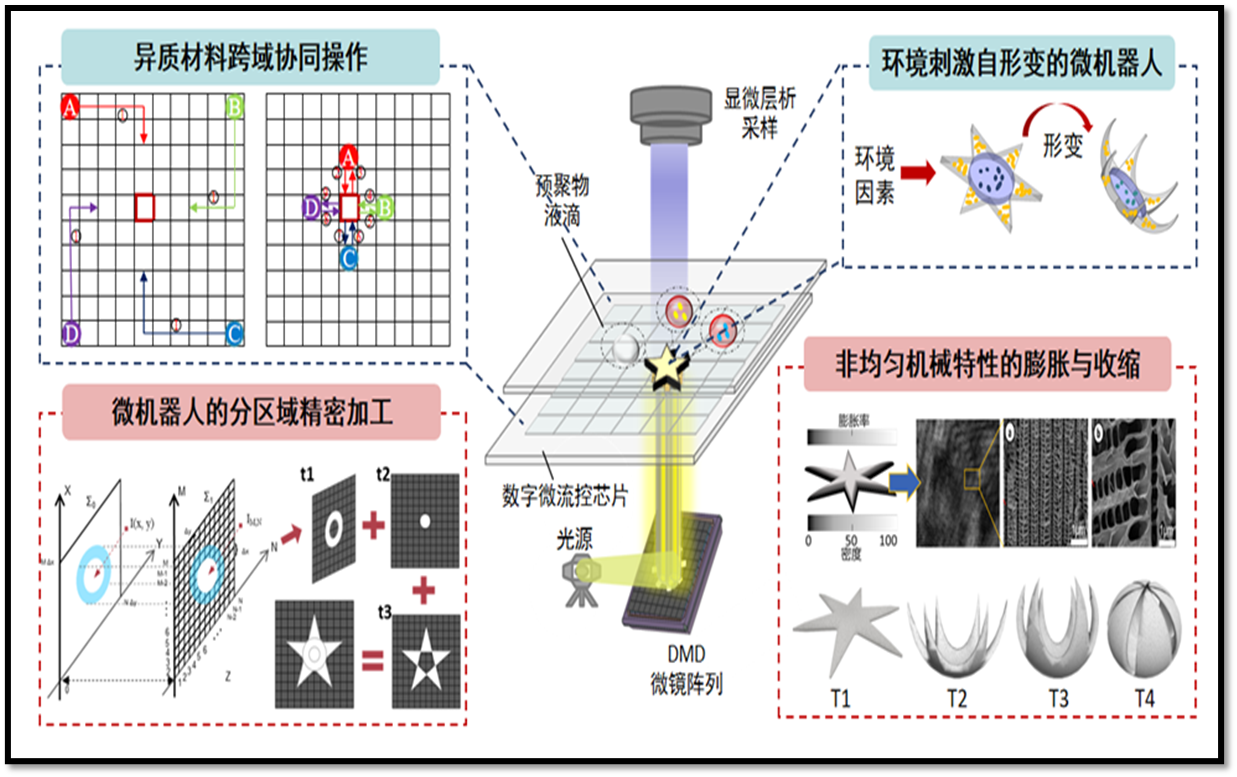
Microrobots at milli-, micro-, and nano-scales can perform tasks in confined environments under physical-field actuation, making them promising candidates for disruptive biomedical devices. To address low locomotion efficiency, limited sensing capability, and motion-control challenges in existing microrobots, this research develops biomimetic microrobot design methods with autonomous deformation, integrated environmental sensing, and multi-modal motion control across complex environments.
王化平 Huaping Wang
机械工程/机器人工程 教授/博导 Professor of Mechanical Engineering&Robot Engineering
My research interests include Robotics and micro and nano biotechnology