磁驱微机器人系统
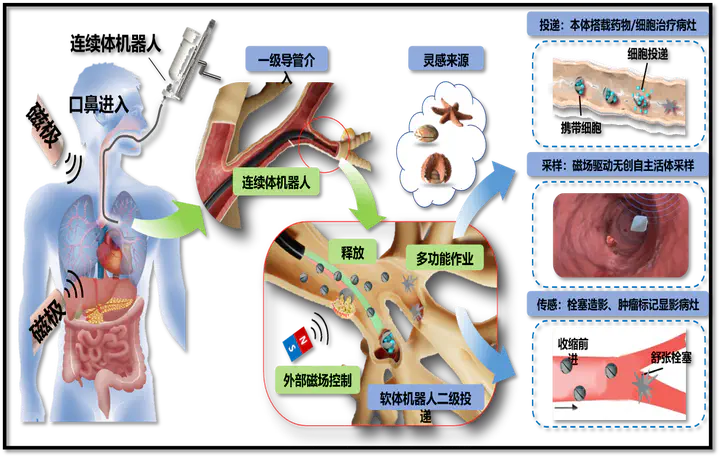
微机器人指尺度在毫-微-纳米级小型机器人,该类机器人能够基于物理场驱动在封闭人体环境执行任务,有望成为颠覆性新兴医疗器械。针对现有微机器人运动效率低、感知能力弱、运动控制难的问题,本研究提出自主形变仿生微机器人本体创成技术,首创环境感知多形变单元一体化集成微机器人;提出微机器人跨域多模态运动控制方法,大幅提升封闭非结构环境下微机器人适应性与作业能力。



王化平 Huaping Wang
机械工程/机器人工程 教授/博导 Professor of Mechanical Engineering&Robot Engineering
My research interests include Robotics and micro and nano biotechnology